web3
调用
NAND
广度优先
ufs
轨道融合仿真
flask
pxc集群
监控
NPDP认证
mvc
共阴极-共阳极判定
g2o优化
指针空值nullptr
wwf
质量管理
期末考试
重定位
asio
413
定位导航
2024/4/29 10:15:20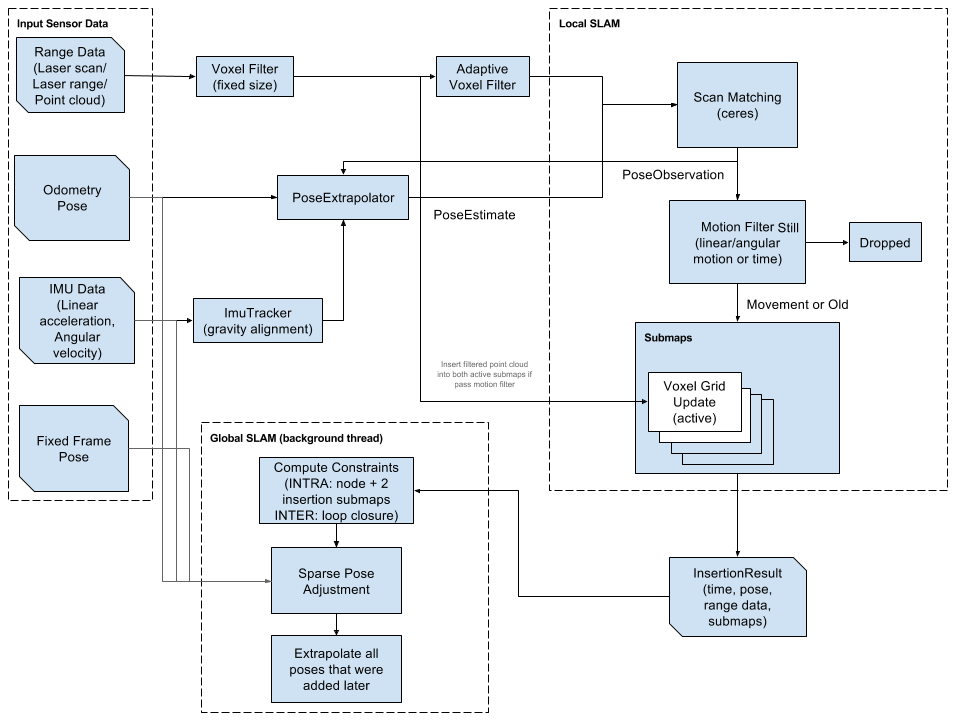
每日浅读SLAM论文——简析Cartographer
文章目录 二维激光SLAM简单框架前端scan matchingSubmaps构建 后端分支定界优化csm(CorrelativeScanMatch) 代码实现框架 Cartographer(论文名:Real-Time Loop Closure in 2D LIDAR SLAM)是目前二维激光SLAM中应用最广…

定位导航算法高级框架设计
一、前言
在卫星和高端传感器的数据中。精通《设计模式》和算法,可以帮助您分析并做出更有力和知识渊博的决策,实现导航领域中搜索引擎的强大算法设计。
二、后端算法高级框架设计图 三、相关设计模式的类名词说明
1、蒙特卡罗树搜索 - 图形化模拟 Up…
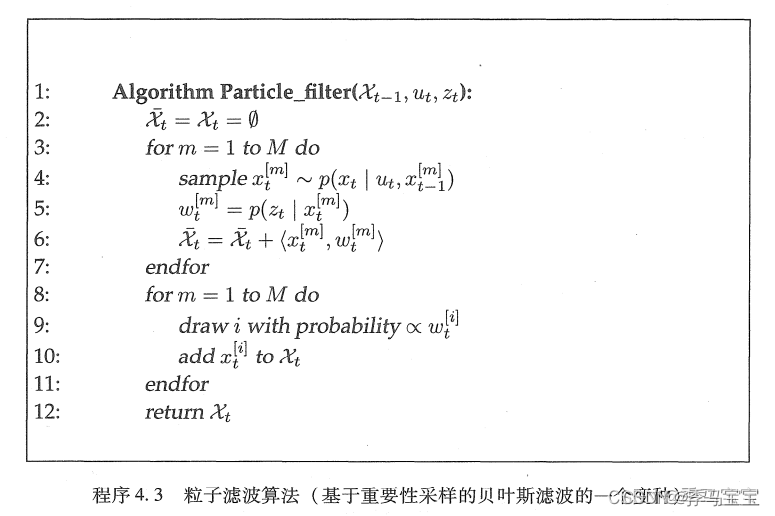
每日浅读SLAM论文——简析Gmapping
文章目录 粒子滤波算法Gmapping改进 Gmapping是基于粒子滤波的二维激光SLAM算法,虽然自从cartographer出现后已经不太使用了(因为他没有回环,且随着地图大小提升需要更多粒子,算法复杂度过高),但是它任然是…
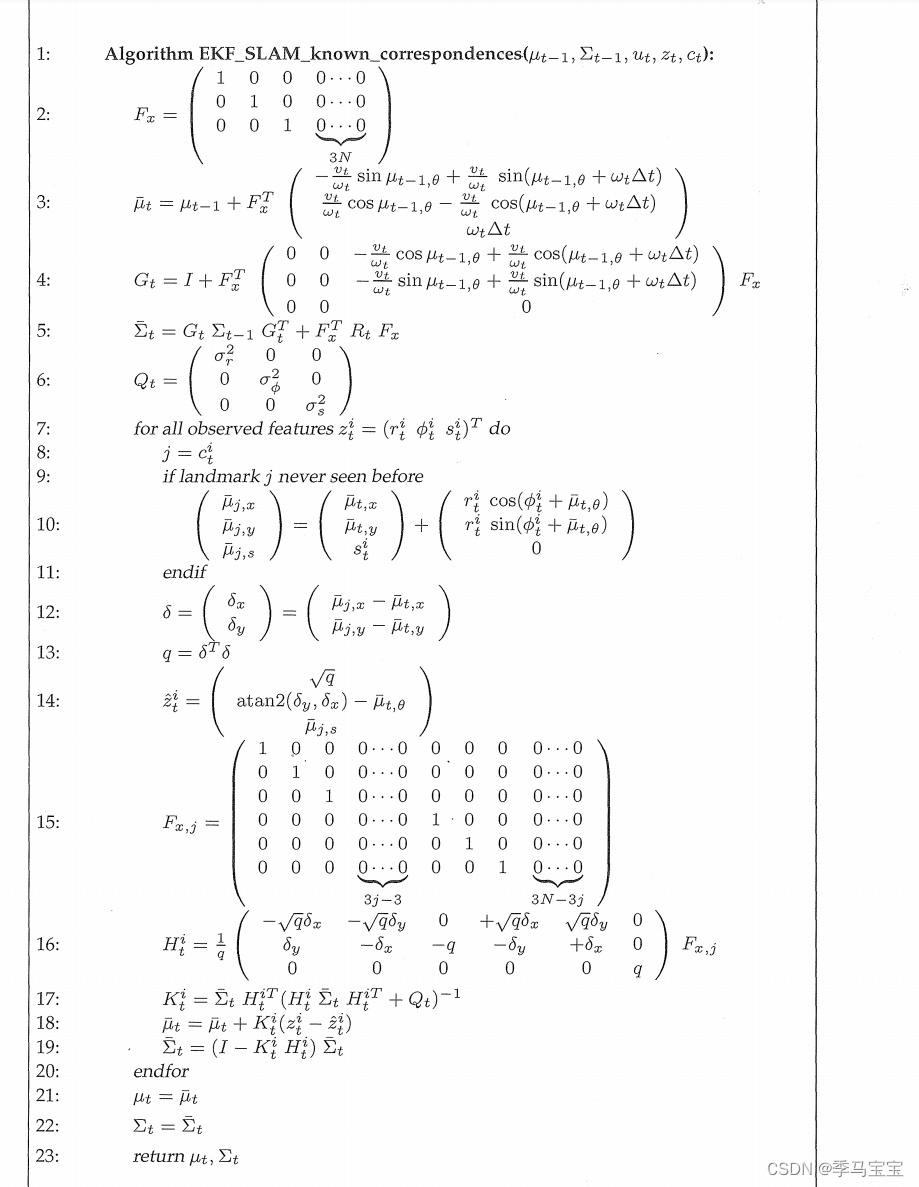
python实现全向轮EKF_SLAM
python实现全向轮EKF_SLAM 代码地址及效果运动预测观测修正参考算法 代码地址及效果
代码地址
运动预测
简化控制量 u t u_t ut 分别定义为 v x Δ t v_x \Delta t vxΔt, v y Δ t v_y \Delta t vyΔt,和 ω z Δ t \omega_z \Delta t ωz…